

Der Multifunktionsgreifer kann ohne gesonderte Programmierung verwendet werden, denn ein Wegmesssystem überwacht permanent den gegriffenen Durchmesser und die SPS vergleicht diesen Wert mit dem Greiferdurchmesser, der in einem zentral in der SPS hinterlegten Rezept zusätzlich mit einem Toleranzband versehen ist.
Automatisiertes Werkstückhandling auch in beengten Räumen
Aufgrund seiner platzsparenden, komplett rüstfreien Bauform ermöglicht der Multifunktionsgreifer ein automatisiertes Bauteilhandling und eine unterbrechungsfreie Produktion auch in beengten Räumlichkeiten, denn es wird kein zusätzlicher Platz für Greiferwechselsysteme in der Zelle benötigt. Dank seiner Flexibilität ist er für eine Vielfalt unterschiedlicher Anwendungen bei Handhabung, Automation und Zerspanung geeignet.
Für rotationssymmetrische Werkstücke bis 20 kg Gewicht
In der Standardausführung ist der kompakte Multifunktionsgreifer für rotationssymmetrische Werkstücke mit Innendurchmessern von 40 mm bis 256 mm und Gewichten zwischen 100 g und 20 kg konzipiert. Für andere Anforderungen können die Parameter individuell angepasst werden. Auf Wunsch sind außerdem Greifer mit größeren Armen für ein kombiniertes Außen- und Innengreifen möglich.
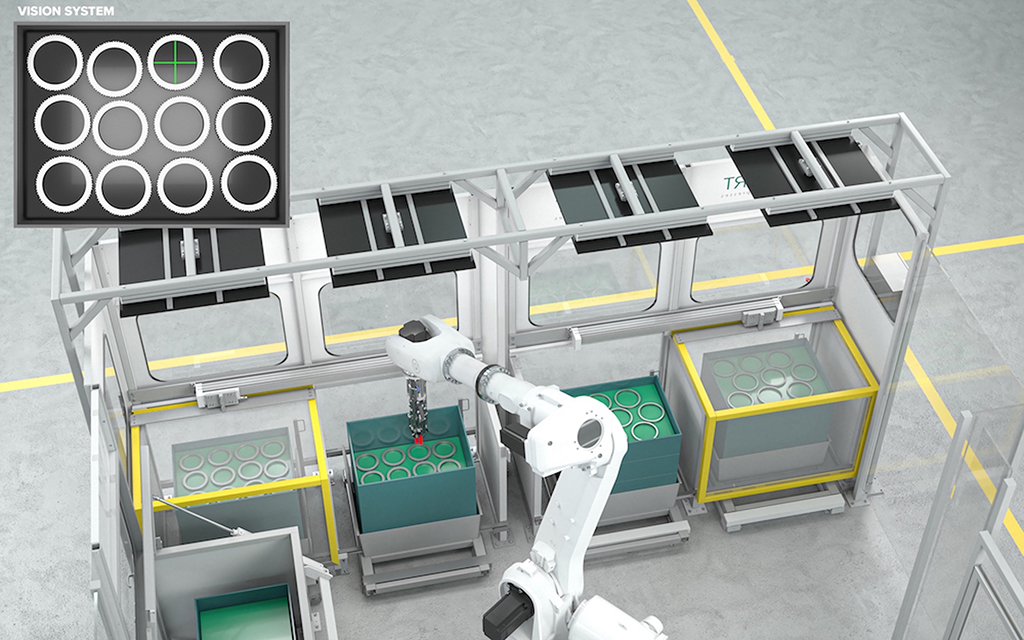
Bildverarbeitung überwacht und dirigiert den Greifer
Mithilfe von Kameras, einer Bildverarbeitung sowie einem integrierten Wegmesssystem erkennt der Multifunktionsgreifer sowohl den Innendurchmesser als auch die Position von Bauteilen. Außerdem überwacht er die verbliebene Teilemenge und stellt fest, wann eine Bauteillage leer ist.
Über eine Plausibilitätsprüfung entscheidet das System über die Eignung von Werkstücken für eine Weiterverarbeitung. Offensichtlich falsche oder falsch gegriffene Bauteile werden so zuverlässig detektiert und gar nicht erst weiter gehandelt.

Selbst kleine, eng gepackte Bauteile in Ecken werden erreicht
Der Greiferarm hat standardmäßig eine Höhe von 730 mm. Da er mit einem Durchmesser von 160 mm sehr schlank gebaut ist, kann er selbst kleine Bauteile bei einer hohen Packdichte in einer Palette exakt greifen, auch dann, wenn sie in den Ecken von Paletten liegen. Ist ein Werkstück verrutscht, so dass es der Greifer nicht erreicht, ziehen die Finger es in eine Position, in der der Zugriff möglich ist.
Der Greiferdruck ist individuell einstellbar
Den Greiferfingern steht ein großzügig bemessener Hub zur Verfügung. Sie sind an den produktberührenden Flächen mit einer verschleißfesten Gummibeschichtung versehen, die für einen hohen Reibwert und einen prozesssicheren Griff sorgt. Je nach Anforderung kann der Greiferdruck individuell zwischen 460 N und 3.000 N eingestellt werden. Dadurch lassen sich sowohl schwere als auch leichte und filigrane Bauteile sicher und ohne Beschädigungen fassen. Außerdem können die Greiferfinger optional mit einem formschlüssigen Untergriff ausgestattet werden.

Kontakt:


